
 Simetría involutiva Cs, (*) [ ] = |
 Simetría cíclica Cnv, (*nn) [n] = |
 Simetría diédrica Dnh, (*n22) [n,2] = | |
| Grupo poliédrico, [n,3], (*n32) | |||
|---|---|---|---|
 Simetría tetraédrica Td, (*332) [3,3] = |
 Simetría octaédrica Oh, (*432) [4,3] = |
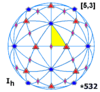 Simetría icosaédrica Ih, (*532) [5,3] = | |
En geometría, un grupo puntual en tres dimensiones es un grupo de isometría tridimensional que deja fijo el origen, o en consecuencia, un grupo de isometría de una esfera. Es un subgrupo del grupo ortogonal O(3), el grupo de todas las isometrías que dejan fijo el origen, o correspondientemente el grupo de matrices ortogonales. O(3) en sí mismo es un subgrupo del grupo euclídeo E(3) de todas las isometrías.
Los grupos de simetría de objetos geométricos son grupos de isometría. En consecuencia, el análisis de grupos de isometría es el análisis de posibles simetrías. Todas las isometrías de un objeto 3D acotado (finito) tienen uno o más puntos fijos comunes. Se sigue la convención habitual eligiendo el origen como uno de ellos.
El grupo de simetría de un objeto también se denomina a veces su grupo de simetría total, a diferencia de su grupo de simetría propio, la intersección de su grupo de simetría total con E+(3), que consta de todos las isometrías directas , es decir, isometrías que conservan la orientación. Para un objeto acotado, el grupo de simetría propio se denomina grupo de rotación. Es la intersección de su grupo de simetría total con SO(3), el grupo de rotación total del espacio 3D. El grupo de rotación de un objeto delimitado es igual a su grupo de simetría total si y solo si el objeto es quiral.
Los grupos de puntos que son generados puramente por un conjunto finito de planos de reflexión que pasan por el mismo punto son los grupos de Coxeter, representados por la notación de Coxeter.
Los grupos de puntos en tres dimensiones se usan mucho en química, especialmente para describir las simetrías de las moléculas y de los orbitales moleculares que forman los enlaces covalentes, y en este contexto también se les llama grupos de puntos moleculares.
Isometrías tridimensionales que dejan el origen fijo
Las isometrías sobre un espacio tridimensional R3 que dejan fijo el origen, formando el grupo O(3), se pueden categorizar de la siguiente manera:
- SO(3):
- Identidad
- Rotación alrededor de un eje que pasa por el origen en un ángulo no igual a 180°
- Rotación alrededor de un eje que pasa por el origen en un ángulo de 180°
- Lo mismo con inversión (x se asigna a −x), es decir, respectivamente:
- Inversión
- Rotación alrededor de un eje por un ángulo no igual a 180°, combinado con reflexión en el plano a través del origen perpendicular al eje
- Reflexión en un plano a través del origen
El 4º y 5º enunciados en particular, y en un sentido más amplio también el 6º, se denominan rotaciones impropias.
Véase también el grupo de las traslaciones, de características similares.
Conjugación
Al comparar el tipo de simetría de dos objetos, el origen se elige para cada uno por separado, es decir, no es necesario que tengan el mismo centro. Además, dos objetos se consideran del mismo tipo de simetría si sus grupos de simetría son subgrupos conjugados de O(3) (dos subgrupos H1, H2 de un grupo G son conjugados, si existe g ∈ G tal que H1 = g−1H2g).
Por ejemplo, dos objetos tridimensionales poseen el mismo tipo de simetría si se cumple que:
- Si ambos tienen simetría especular, pero con respecto a un plano especular diferente
- Si ambos tienen simetría rotacional triple, pero con respecto a un eje diferente
En el caso de múltiples planos especulares y/o ejes de rotación, dos grupos de simetría son del mismo tipo de simetría si y solo si hay una rotación que permite aplicar toda la estructura del primer grupo de simetría con la del segundo. De hecho, habrá más de una rotación de este tipo, pero no un número infinito como cuando solo hay un plano especular o un eje. La definición de conjugación también permitiría obtener una imagen especular de la estructura, pero esto no es necesario, dado que la estructura misma es aquiral. Por ejemplo, si un grupo de simetría contiene un eje de rotación triple, contiene rotaciones en dos direcciones opuestas (es decir, la estructura es quiral para 11 pares de grupos espaciales y con un eje helicoidal).
Grupos de isometría infinita
Hay muchos grupos de isometría infinita; por ejemplo, el "grupo cíclico" (lo que significa que es generado por un elemento, que no debe confundirse con un grupo de torsión) generado por una rotación de un número irracional de vueltas alrededor de un eje. Se pueden crear grupos abelianos no cíclicos agregando más rotaciones alrededor del mismo eje. También hay grupos no abelianos generados por rotaciones alrededor de diferentes ejes. Estos suelen ser (genéricamente) grupos libres. Serán infinitos a menos que las rotaciones se elijan especialmente.
Todos los grupos infinitos mencionados hasta ahora no son cerrados como subgrupos topológicos de O(3). Aquí se analizan los subgrupos topológicamente cerrados de O(3).

Todo O(3) es el grupo de simetría de simetría esférica; siendo SO(3) el grupo de rotación correspondiente. Los otros grupos de isometría infinita consisten en todos los movimientos de rotación sobre un eje que pasa por el origen, y aquellos con reflexión adicional en los planos por el eje, y/o reflexión en el plano por el origen, perpendicular al eje. Aquellos con reflexión en los planos que pasan por el eje, con o sin reflexión en el plano por el origen perpendicular al eje, son los grupos de simetría para los dos tipos de simetría esférica. Cualquier forma 3D (subconjunto de R3) que tenga simetría rotacional infinita también debe tener simetría especular para cada plano a través del eje. Los objetos físicos, como un cono que gira alrededor de su eje, pueden tener una simetría rotacional infinita sin tener una simetría especular.[1]
Hay siete grupos continuos que son todos los límites de los grupos de isometría finitos. Estos llamados "grupos de puntos limitantes" o "grupos limitantes de Curie" llevan el nombre de Pierre Curie, quien fue el primero en investigarlos.[1][2] Las siete series infinitas de grupos axiales conducen a cinco grupos límite (dos de ellos son duplicados), y los siete grupos puntuales restantes producen dos grupos continuos más. En notación internacional, la lista es ∞, ∞2, ∞/m, ∞mm, ∞/mm, ∞∞ y ∞∞m.[3]
Grupos de isometría finitos
Las simetrías en 3D que dejan fijo el origen se caracterizan completamente por simetrías en una esfera centrada en el origen. Para grupos finitos de puntos 3D, véase también el artículo sobre los grupos de simetría esférica.
Teniendo en cuenta la conjugación, el conjunto de grupos de puntos 3D finitos consta de:
- 7 series infinitas con como máximo un eje de rotación de más de multiplicidad doble; son los grupos de simetría finitos en una superficie cilíndrica infinita, o de manera equivalente, los de un cilindro finito. A veces se denominan grupos de puntos axiales o prismáticos.
- 7 grupos de puntos con múltiples ejes de rotación de multiplicidad 3 o más. También se pueden caracterizar como grupos de puntos con múltiples ejes de rotación triples, porque los 7 incluyen estos ejes; con respecto a los ejes de rotación triples, las combinaciones posibles son:
- 4 ejes triples
- 4 ejes triples y 3 ejes cuádruples
- 10 ejes triples y 6 ejes quíntuples
Según el teorema de restricción cristalográfica, un número limitado de grupos de puntos es compatible con la simetría traslacional discreta: 27 de las 7 series infinitas y 5 de las otras 7. Juntos, forman los llamados 32 grupos de puntos cristalográficos.
Las siete series infinitas de grupos axiales
Las series infinitas de grupos axiales o prismáticos tienen un índice n, que puede ser cualquier número entero. En cada serie, el grupo de simetría n contiene simetría rotacional de multiplicidad n sobre un eje, es decir, simetría con respecto a una rotación en un ángulo de 360°/n. n=1 cubre los casos sin simetría rotacional. Hay cuatro series sin otros ejes de simetría rotacional (véase simetrías cíclicas) y tres con ejes adicionales de simetría doble (véase grupo diedral). Pueden entenderse como grupos de puntos en dos dimensiones extendidos con una coordenada axial y reflexiones en ella. Están relacionados con los frisos,[4] y pueden interpretarse como patrones de grupos de frisos repetidos n veces alrededor de un cilindro.
La siguiente tabla enumera varias notaciones para grupos de puntos, utilizando la notación de Hermann-Mauguin (usada en cristalografía), la notación de Schönflies (usada para describir la simetría molecular), la notación orbifold y la notación de Coxeter. Los tres últimos no solo están convenientemente relacionados con sus propiedades, sino también con el orden del grupo. La notación orbifold es una notación unificada, también aplicable para el grupo del papel pintado y para los frisos. Los grupos cristalográficos tienen n restringida a 1, 2, 3, 4 y 6; la eliminación de la restricción cristalográfica permite cualquier número entero positivo. La serie de elementos resultante es:
| Internac. | Schoenflies | Orbifold | Coxeter | Friso | Estructura | Orden | Ejemplo | Comentarios | |
|---|---|---|---|---|---|---|---|---|---|
| n par | n impar | (cilindro) | |||||||
| n | Cn | nn | [n]+ |
p1 | Zn | n | Simetría rotacional de orden n | ||
| 2n | n | S2n | n× | [2n+,2+] |
p11g | Z2n | 2n | Simetría de rotación impropia de orden 2n | |
| n/m | 2n | Cnh | n* | [n+,2] |
p11m | Zn×Z2 | 2n | ||
| nmm | nm | Cnv | *nn | [n] |
p1m1 | Dihn | 2n | Simetría piramidal; en biología, simetría birradial | |
| n22 | n2 | Dn | 22n | [n,2]+ |
p211 | Dihn | 2n | Simetría diédrica | |
| 2n2m | nm | Dnd | 2*n | [2n,2+] |
p2mg | Dih2n | 4n | Simetría antiprismática | |
| n/mmm | 2n2m | Dnh | *22n | [n,2] |
p2mm | Dihn×Z2 | 4n | Simetría prismática | |
Para n impar se tiene que Z2n = Zn × Z2 y Dih2n = Dihn × Z2.
Los grupos Cn (incluido el trivial C1) y Dn son quirales, los demás son aquirales.
Los términos horizontal (h) y vertical (v), y los subíndices correspondientes, se refieren al plano especular adicional, que puede ser paralelo al eje de rotación (vertical) o perpendicular al eje de rotación (horizontal).
Los grupos axiales no triviales más simples son equivalentes al grupo abstracto Z2:
- Ci (equivalente a S2) – simetría de inversión
- C2 – 2 veces simetría rotacional
- Cs (equivalente a C1hy C1v) – simetría especular, también llamado de simetría bilateral.

El segundo de ellos es el primero de los grupos uniaxiales (grupos cíclicos) Cn de orden n (también aplicable en 2D), que son generados por una sola rotación en un ángulo de 360°/n. Además de esto, se puede agregar un plano especular perpendicular al eje, dando el grupo Cnh de orden 2n, o un conjunto de n planos especulares que contienen el eje, dando el grupo Cnv, también de orden 2n. Este último es el grupo de simetría de una pirámide regular de n lados. Un objeto típico con el grupo de simetría Cn o Dn es una hélice.
Si se agregan los planos de reflexión horizontal y vertical, sus intersecciones dan n ejes de rotación de 180°, por lo que el grupo ya no es uniaxial. Este nuevo grupo de orden 4n se denomina Dnh. Su subgrupo de rotaciones es el grupo diédrico Dn de orden 2n, que todavía tiene los ejes de rotación dobles perpendiculares al eje de rotación principal, pero no tiene planos de simetría especular.
Nota: en 2D, Dn incluye reflexiones, que también se pueden ver como voltear objetos planos sin distinción de anverso y reverso; pero en 3D, se distinguen las dos operaciones: Dn incluye la operación de voltear, pero no las reflexiones.
Hay un grupo más en esta familia, llamado Dnd (o Dnv), que tiene planos especulares verticales que contienen el eje de rotación principal, pero en lugar de tener un plano especular horizontal, tiene una isometría que combina una reflexión en el plano horizontal y una rotación en un ángulo de 180°/n. Dnh es el grupo de simetría de un prisma regular n-gonal y también para una bipirámide regular n-gonal. Dnd es el grupo de simetría para un antiprisma regular n-gonal, y también para un trapezoedro regular n-gonal. Dn es el grupo de simetría de un prisma parcialmente rotado (retorcido).
Los grupos D2 y D2h son dignos de mención porque no tienen un eje de rotación especial. Más bien, hay tres ejes perpendiculares de orden 2. D2 es un subgrupo de todas las simetrías poliédricas (véase más abajo) y D2h es un subgrupo de los grupos poliédricos Th y Oh. D2 aparece en moléculas como el twistano y en homotetrámeros como el Concanavalin A. Los elementos de D2 están en correspondencia 1 a 2 con las rotaciones dadas por el cuaternión de Hurwitz unitario.
El grupo Sn se genera por la combinación de una reflexión en el plano horizontal y una rotación de un ángulo de 360°/n. Para n impar esto es igual al grupo generado por los dos por separado, Cnh de orden 2n, y por lo tanto no se necesita la notación Sn. Sin embargo, para n par es distinto, y de orden n. Al igual que Dnd, contiene distintas rotaciones impropias pero sin contener a las rotaciones correspondientes.
Todos los grupos de simetría en las 7 series infinitas son diferentes, excepto por los siguientes cuatro pares de iguales entre sí:
- C1h y C1v: grupo de orden 2 con un solo reflejo (Cs).
- D1 y C2: grupo de orden 2 con una sola rotación de 180°.
- D1h y C2v: grupo de orden 4 con una reflexión en un plano y una rotación de 180° a través de una línea en ese plano.
- D1d y C2h: grupo de orden 4 con una reflexión en un plano y una rotación de 180° sobre una recta perpendicular a ese plano.
S2 es el grupo de orden 2 con una sola inversión (Ci).
"Igual" se entiende aquí como lo mismo, pero sin considerar elementos conjugados en el espacio. Esta condición es menos restrictiva que "sin considerar isomorfismos algebraicos". Por ejemplo, hay tres grupos diferentes de orden dos en el primer sentido, pero solo hay uno en el segundo sentido. Del mismo modo, por ejemplo, S2n es algebraicamente isomorfo con Z2n.
Los grupos se pueden construir de la siguiente manera:
- Cn. Generado por un elemento también llamado Cn, que corresponde a una rotación de ángulo 2π/n alrededor del eje. Sus elementos son E (la identidad), Cn, Cn2, ..., Cnn−1, correspondientes a los ángulos de rotación 0, 2π/n, 4π/n, ..., 2(n − 1)π/n.
- S2n. Generado por el elemento C2nσh, donde σh es una reflexión en la dirección del eje. Sus elementos son los elementos de Cn con C2nσh, C2n3σh, ..., C2n2n−1σh añadido.
- Cnh. Generado por el elemento Cn y la reflexión σh. Sus elementos son los elementos del grupo Cn, a los que se añaden los elementos σh, Cnσh, Cn2σh, ..., Cnn−1σh.
- Cnv. Generado por el elemento Cn y la reflexión σv en una dirección en el plano perpendicular al eje. Sus elementos son los elementos del grupo Cn, a los que se añaden los elementos σv, Cnσv, Cn2σv, ..., Cnn−1σv.
- Dn. Generado por el elemento Cn y rotación de 180° U = σhσv alrededor de una dirección en el plano perpendicular al eje. Sus elementos son los elementos del grupo Cn, a los que se añaden los elementos U, CnU, Cn2U, ..., Cnn − 1U.
- Dnd. Generado por los elementos C2nσh y σv. Sus elementos son los elementos del grupo Cn y los elementos adicionales de S2n y Cnv, con los elementos C2nσhσv, C2n3σhσv, .. ., agregando C2n2n − 1σhσv.
- Dnh. Generado por los elementos Cn, σh y σv. Sus elementos son los elementos del grupo Cn y los elementos adicionales de Cnh, Cnv y Dn.
Cuando n se toma como ∞ se obtienen grupos con rotaciones axiales continuas:
| Internac. | Schoenflies | Orbifold | Coxeter | Límite de | Grupo abstracto | ||
|---|---|---|---|---|---|---|---|
| ∞ | C∞ | ∞∞ | [∞]+ | Cn | Z∞ | SO(2) | |
| ∞, ∞/m | C∞h | ∞* | [2,∞+] | Cnh, S2n | Z2×Z∞ | Z2×SO(2) | |
| ∞m | C∞v | *∞∞ | [∞] | Cnv | Dih∞ | O(2) | |
| ∞2 | D∞ | 22∞ | [2,∞]+ | Dn | Dih∞ | O(2) | |
| ∞m, ∞/mm | D∞h | *22∞ | [2,∞] | Dnh, Dnd | Z2×Dih∞ | Z2×O(2) | |
Los siete grupos de puntos restantes
Se dice que los grupos de puntos restantes tienen una simetría muy alta o poliédrica porque tienen más de un eje de rotación de orden mayor que 2. Aquí, Cn denota un eje de rotación de 360°/n y S n denota un eje de rotación impropio a través del mismo. En líneas sucesivas figuran la notación orbifold, la notación de Coxeter y el diagrama de Coxeter-Dynkin, y la notación de Hermann-Mauguin (completa si es diferente o abreviada) y el orden (número de elementos) del grupo de simetría. Los grupos son:
| T, (332) [3,3]+ ( 23 order 12 |
Simetría tetraédrica quiral |
Los ejes de simetría de rotación triple (C3) de un tetraedro. Los ejes de simetría de rotación doble (C2) de un tetraedro. Hay cuatro ejes C3, cada uno a través de dos vértices de un cubo circunscrito (cubo rojo en las imágenes), o a través de un vértice de un tetraedro regular, y tres ejes C2, a través de los centros de las caras del cubo, o los puntos medios de las aristas del tetraedro. Este grupo es isomorfo a A4, el grupo alternante sobre 4 elementos, y es el grupo de rotación de un tetraedro regular. Es un subgrupo normal de Td, Th, y las simetrías octaédricas. Los elementos del grupo corresponden 1 a 2 a las rotaciones dadas por los 24 cuaterniones de Hurwitz unitarios (el grupo tetraédrico binario). |
| Td, (*332) [3,3] ( 43m order 24 |
Simetría tetraédrica completa |
Un plano especular de un tetraedro Un eje de rotorreflexión de simetría cuádruple (S4) de un tetraedro. Este grupo es el grupo de simetría de un tetraedro regular. Tiene los mismos ejes de rotación que T, y los ejes C2 ahora son ejes S4. Posee seis planos de simetría, cada uno de los cuales contiene dos aristas del cubo o una arista del tetraedro, un único eje S4 y dos ejes C3 ejes. Td es isomorfo a S4, el grupo simétrico de 4 letras, porque existe una correspondencia 1 a 1 entre los elementos de Td y las 24 permutaciones de los cuatro ejes de simetría triple. Un objeto de simetría C3v bajo uno de los 3 ejes da lugar bajo la acción de Td a una órbita que consta de cuatro de tales objetos, y Td corresponde al conjunto de permutaciones de estos cuatro objetos. Td es un subgrupo normal de Oh. Véanse también las isometrías del tetraedro regular. |
| Th, (3*2) [3+,4] ( 2/m3, m3 order 24 |
Simetría piritoédrica |  |
| O, (432) [4,3]+ ( 432 order 24 |
Simetría octaédrica quiral | Este grupo es como T, pero los ejes C2 ahora son ejes C4, y adicionalmente hay 6 ejes C2, que pasan por los puntos medios de las aristas del cubo. Este grupo también es isomorfo a S4 porque sus elementos están en correspondencia 1 a 1 con las 24 permutaciones de los ejes de simetría triple, como con T. Un objeto de simetría D3 bajo uno de los 3 ejes da lugar bajo la acción de O a una órbita consistente en cuatro de esos objetos, y O corresponde al conjunto de permutaciones de estos cuatro objetos. Es el grupo de rotación del cubo y el octaedro. Representando las rotaciones con cuaterniones, O se compone de los 24 cuaterniones de Hurwitz unitarios y de los 24 cuaterniones de Lipschitz de norma cuadrada 2 normalizada al dividir por . Como antes, esta es una correspondencia de 1 a 2. |
| Oh, (*432) [4,3] ( 4/m32/m, m3m order 48 |
Simetría octaédrica completa | Este grupo tiene los mismos ejes de rotación que O, pero con planos de simetría, que comprenden los planos especulares de Td y Th. Este grupo es isomorfo a S4 × Z2 (porque tanto O como Ci son subgrupos normales), y es el grupo de simetría del cubo y el octaedro. Véanse también las isometrías del cubo. |
| I, (532) [5,3]+ ( 532 order 60 |
Simetría icosaédrica quiral | El grupo de rotación del icosaedro y el dodecaedro. Es un subgrupo normal de índice 2 en el grupo completo de simetrías Ih. El grupo contiene 10 versiones de D3 y 6 versiones de D5 (simetrías rotacionales de prismas y antiprismas). También contiene cinco versiones de T (véase el compuesto de cinco tetraedros). El grupo I' es isomorfo a A5, el grupo alternante de 5 letras, ya que sus elementos corresponden 1 a 1 con las permutaciones pares de las cinco simetrías T (o los cinco tetraedros recién mencionados). Representando las rotaciones con cuaterniones, I se compone de los 120 icosianos unitarios. Como antes, esta es una correspondencia de 1 a 2. |
| Ih, (*532) [5,3] ( 532/m, 53m order 120 |
Simetría icosaédrica completa | Es el grupo de simetría del icosaedro y del dodecaedro. El grupo Ih es isomorfo a A5 × Z2 porque I y Ci son ambos subgrupos normales. El grupo contiene 10 versiones de D3d, 6 versiones de D5d (simetrías como las de un antiprisma) y 5 versiones de T' 'h. |





Los grupos continuos relacionados con estos grupos son:
- ∞∞, K, o SO(3), con todas las rotaciones posibles.
- ∞∞m, Kh, o O(3), con todas las rotaciones y reflexiones posibles.
Como se señaló anteriormente para los grupos de isometría infinita, cualquier objeto físico que tenga simetría K también tendrá simetría Kh.
Grupos de Coxeter de reflexión
| A3, [3,3], |
B3, [4,3], |
H3, [5,3], |
|---|---|---|
 6 planos especulares |
 3+6 planos especulares |
 15 planos especulares |
| 2A1, [1,2], |
3A1, [2,2], |
A1A2, [2,3], |
 2 planos especulares |
 3 planos especulares |
 4 planos especulares |
| A1, [1], |
2A1, [2], |
A2, [3], |
 1 plano especular |
 2 planos especulares |
 3 planos especulares |
Los grupos de puntos de reflexión en tres dimensiones también se denominan grupos de Coxeter y pueden estar definidos por un diagrama de Coxeter-Dynkin y representar un conjunto de planos especulares que se cruzan en un punto central. La notación de Coxeter ofrece una anotación entre corchetes equivalente al diagrama de Coxeter, con símbolos de marcado para la rotación y otros grupos de puntos de subsimetría. En la notación de Schoenflies, los grupos de puntos de reflexión en 3D son Cnv, Dnh y los grupos poliédricos completos T, O e I.
Los planos especulares limitan un conjunto de dominios trángulos esféricos en la superficie de una esfera. Un grupo de Coxeter de rango n tiene n planos especulares. Los grupos de Coxeter que tienen menos de 3 generadores poseen dominios de triángulos esféricos degenerados, como lúnulas o semiesferas. En la notación de Coxeter, estos grupos presentan simetría tetraédrica [3,3], simetría octaédrica [4,3], simetría icosaédrica [5,3] y simetría diédrica [p,2]. El número de planos especulares para un grupo irreducible es nh/2, donde h es el número de Coxeter del grupo de Coxeter y n es la dimensión (3).[5]
| Grupo de Weyl |
Notación de Coxeter |
Orden | Número<br/>de Coxeter (h) |
Planos especulares (m) | |
|---|---|---|---|---|---|
| Grupos poliédricos | |||||
| A3 | [3,3] | 24 | 4 | 6 | |
| B3 | [4,3] | 48 | 6 | 3+6 | |
| H3 | [5,3] | 120 | 10 | 15 | |
| Grupos diédricos | |||||
| 2A1 | [1,2] | 4 | 1+1 | ||
| 3A1 | [2,2] | 8 | 2+1 | ||
| I2(p)A1 | [p,2] | 4p | p+1 | ||
| Grupos cíclicos | |||||
| 2A1 | [2] | 4 | 2 | ||
| I2(p) | [p] | 2p | p | ||
| Plano especular simple | |||||
| A1 | [ ] | 2 | 1 | ||
Grupos de rotación
Los grupos de rotación, es decir, los subgrupos finitos de SO(3), son: los grupos cíclicos Cn (el grupo de rotación de una pirámide canónico), los grupos diédricos Dn (el grupo de rotación de un prisma uniforme, o una bipirámide canónico), y los grupos de rotación T, O e I de un tetraedro, octaedro/cubo y un icosaedro/dodecaedro regulares.
En particular, los grupos diédricos D3, D4, etc. son los grupos de rotación de polígonos regulares planos incrustados en un espacio tridimensional, y tal figura puede considerarse como un prisma regular degenerado. Por lo tanto, también se le llama diedro (del griego: sólido de dos caras), lo que explica el nombre de grupo diédrico.
- Un objeto que tiene el grupo de simetría Cn, Cnh, Cnv o S2n tiene el grupo de rotación Cn.
- Un objeto que tiene un grupo de simetría Dn, Dnh o Dnd tiene un grupo de rotación Dn.
- Un objeto que tiene una simetría poliédrica (T, Td, Th, O, Oh, I o I h) tiene como grupo de rotación el correspondiente sin subíndice: T, O o I.
El grupo de rotación de un objeto es igual a su grupo de simetría completo si y solo si el objeto es quiral. En otras palabras, los objetos quirales son aquellos con su grupo de simetría en la lista de los grupos de rotación.
Dados en la notación de Schönflies, en la notación de Coxeter y en la (notación orbifold), los subgrupos de rotación son:
| Reflexión | Rotorreflexión | Rotación impropia | Rotación |
|---|---|---|---|
| Cnv, [n], (*nn) | Cnh, [n+,2], (n*) | S2n, [2n+,2+], (n×) | Cn, [n]+, (nn) |
| Dnh, [2,n], (*n22) | Dnd, [2+,2n], (2*n) | Dn, [2,n]+, (n22) | |
| Td, [3,3], (*332) | T, [3,3]+, (332) | ||
| Oh, [4,3], (*432) | Th, [3+,4], (3*2) | O, [4,3]+, (432) | |
| Ih, [5,3], (*532) | I, [5,3]+, (532) |
Correspondencia entre grupos de rotación y otros grupos
Grupos que contienen inversión
El grupo de rotación SO(3) es un subgrupo de O(3), el grupo de rotación de punto completo del espacio euclídeo tridimensional. En consecuencia, O(3) es el producto directo de SO(3) y el grupo de inversión Ci (donde la inversión se denota por su matriz −I):
- O(3) = SO(3) × {I , −I}
Por lo tanto, existe una correspondencia 1 a 1 entre todas las isometrías directas y todas las isometrías indirectas, a través de la inversión. También hay una correspondencia 1 a 1 entre todos los grupos H de isometrías directas en SO(3) y todos los grupos K de isometrías en O(3) que contienen inversión:
- K = H × {I , −I}
- H = K ∩ SO(3)
donde la isometría (A, I) es la identidad con A.
Para grupos finitos, la correspondencia es:
| Grupo de rotación H |
Paridad de n |
Grupo conteniendo inversión K |
|---|---|---|
| Cn | par | Cnh |
| impar | S2n | |
| Dn | par | Dnh |
| impar | Dnd | |
| T | Th | |
| O | Oh | |
| I | Ih |
Grupos que contienen isometrías indirectas pero sin inversión
Si un grupo de isometrías directas H tiene un subgrupo L de índice 2, entonces hay un grupo correspondiente que contiene isometrías indirectas pero no inversión:
- M = L ∪ ((H∖L) × { −I })
Por ejemplo, H = C4 corresponde a M = S4.
Así M se obtiene de H invirtiendo las isometrías en H ∖ L. Este grupo M es, cuando se considera como un grupo abstracto, isomorfo a H. Por el contrario, para todos los grupos de puntos M que contienen isometrías indirectas pero sin inversión, se puede obtener un grupo de rotación H invirtiendo las isometrías indirectas.
Para grupos finitos, la correspondencia es:
| Grupo de rotación H |
Subgrupo de índice 2 L |
Paridad de n |
Grupo conteniendo isometrías indirectas M |
|---|---|---|---|
| C2n | Cn | par | S2n |
| impar | Cnh | ||
| D2n | Dn | par | Dnh |
| impar | Dnd | ||
| Dn | Cn | cualquiera | Cnv |
| O | T | Td |
Subgrupos normales
En 2D, el grupo cíclico de movimientos de rotación Ck con multiplicidad k, es para cada entero positivo k un subgrupo normal de O(2) y SO(2). En consecuencia, en 3D, para cada eje, el grupo cíclico de rotaciones de k sobre este eje es un subgrupo normal del grupo de todas las rotaciones sobre el eje dado. Dado que cualquier subgrupo de índice dos es normal, el grupo de rotaciones (Cn) es normal tanto en el grupo (Cnv) obtenido al sumar a (Cn) planos especulares a través de su eje y en el grupo (Cnh) obtenido sumando a (Cn) un plano de reflexión perpendicular a su eje.
Simetrías máximas
Hay dos grupos de puntos discretos con la propiedad de que ningún grupo de puntos discretos lo tiene como subgrupo propio: Oh e Ih. Su subgrupo común más grande es Th. Los dos grupos se obtienen a partir de él cambiando la simetría rotacional de multiplicidad 2 a multiplicidad 4 y agregando una simetría de multiplicidad 5, respectivamente.
Hay dos grupos de puntos cristalográficos con la propiedad de que ningún otro grupo de puntos cristalográficos los tiene como subgrupo propio: Oh y D6h. Sus subgrupos comunes máximos, según la orientación, son D3d y D2h.
Los grupos ordenados por tipo de grupo abstracto
A continuación, los grupos explicados anteriormente están ordenados por tipo de grupo abstracto.
Los grupos abstractos más pequeños que no son ningún grupo de simetría en 3D, son el grupo de los cuaterniones (de orden 8), Z3 × Z3 (de orden 9), el grupo dicíclico Dic3 (de orden 12), y 10 de los 14 grupos de orden 16.
La columna "# de elementos de orden 2" en las siguientes tablas muestra el número total de subgrupos de isometría de tipos C2, Ci y Cs. Este número total es una de las características que ayudan a distinguir los diversos tipos de grupos abstractos, mientras que su tipo de isometría ayuda a distinguir los diversos grupos de isometrías de un mismo grupo abstracto.
Dentro de las posibilidades de los grupos de isometría en 3D, hay infinitos tipos de grupos abstractos con 0, 1 y 3 elementos de orden 2, hay dos con 4n + 1 elementos de orden 2, y hay tres con 4n + 3 elementos de orden 2 (por cada n ≥ 8 ). Nunca hay un número par positivo de elementos de orden 2.
Grupos de simetría en 3D que son cíclicos como grupo abstracto
El grupo de simetría para simetría rotacional de n es Cn; su tipo de grupo abstracto es el grupo cíclico Zn, que también se indica con Cn. Sin embargo, hay dos series infinitas más de grupos de simetría con este tipo de grupo abstracto:
- Para orden par 2n existe el grupo S2n (en la notación de Schoenflies) generado por una rotación de un ángulo de 180°/n alrededor de un eje, combinado con una reflexión en el plano perpendicular al eje. Para S2 se utiliza la notación Ci; y se genera por inversión.
- Para cualquier orden 2n donde n es impar, se tiene que Cnh; posee un eje de rotación de orden n y un plano de reflexión perpendicular. Es generado por una rotación de un ángulo de 360°/n sobre el eje, combinado con la reflexión. Para C1h se utiliza la notación Cs; y se genera por reflexión en un plano.
Así, figuran con negrita de los 10 grupos puntuales cristalográficos cíclicos, para los que se aplica el teorema de restricción cristalográfica:
| Orden | Grupos de isometría | Grupo abstracto | # de elementos de orden 2 | Diagrama cíclico |
|---|---|---|---|---|
| 1 | C1 | Z1 | 0 | |
| 2 | C2, Ci, Cs | Z2 | 1 | |
| 3 | C3 | Z3 | 0 | |
| 4 | C4, S4 | Z4 | 1 | |
| 5 | C5 | Z5 | 0 | |
| 6 | C6, S6, C3h | Z6= Z3 × Z2 | 1 | |
| 7 | C7 | Z7 | 0 | |
| 8 | C8, S8 | Z8 | 1 | |
| 9 | C9 | Z9 | 0 | |
| 10 | C10, S10, C5h | Z10= Z5 × Z2 | 1 |
etc.
Grupos de simetría en 3D que son diédricos como grupo abstracto
En 2D, el grupo diédrico Dn incluye reflexiones, que también se pueden ver como voltear objetos planos sin distinción entre el frente y el reverso.
Sin embargo, en 3D se distinguen las dos operaciones: el grupo de simetría indicado por Dn contiene n ejes de doble simetría perpendiculares al eje de orden n, pero no reflexiones. Dn es el grupo de rotación del prisma de n lados con base regular, y de la bipirámide de n lados con base regular, y también de un antiprisma regular de n lados y de un trapezoedro regular de n lados. El grupo también es el grupo de simetría total de dichos objetos después de convertirlos en quirales, por ejemplo, añadiendo una marca quiral idéntica en cada cara, o alguna modificación en la forma.
El tipo de grupo abstracto es el grupo diédrico Dihn, que también se indica con Dn. Sin embargo, hay otras tres series infinitas de grupos de simetría con este tipo de grupo abstracto:
- Cnv de orden 2n, el grupo de simetría de una pirámide regular de n lados
- Dnd de orden 4n, el grupo de simetría de un antiprisma regular de n lados
- Dnh de orden 4n para n impar. Para n = 1 se obtiene D2, ya mencionado anteriormente, por lo que n ≥ 3.
Téngase en cuenta la siguiente propiedad:
- Dih4n+2 Dih2n+1 × Z2

Así se obtienen los 12 grupos de puntos cristalográficos (en negrita), y se denota D1d como el equivalente a C2h:
| Orden | Grupos de isometría | Grupo abstracto | # de elementos de orden 2 | Diagrama cíclico |
|---|---|---|---|---|
| 4 | D2, C2v, C2h | Dih2= Z2 × Z2 | 3 | |
| 6 | D3, C3v | Dih3 | 3 | |
| 8 | D4, C4v, D2d | Dih4 | 5 | |
| 10 | D5, C5v | Dih5 | 5 | |
| 12 | D6, C6v, D3d, D3h | Dih6= Dih3 × Z2 | 7 | |
| 14 | D7, C7v | Dih7 | 7 | |
| 16 | D8, C8v, D4d | Dih8 | 9 | |
| 18 | D9, C9v | Dih9 | 9 | |
| 20 | D10, C10v, D5h, D5d | Dih10= D5 × Z2 | 11 |
etc.
Otros
C2n,h de orden 4n es del tipo de grupo abstracto Z2n × Z2. Para n = 1 se obtiene Dih2, ya mencionado anteriormente, por lo que n ≥ 2.
Así se obtienen los siguientes grupos, con los 2 grupos puntuales cristalográficos cíclicos en negrita:
| Orden | Grupos de isometría | Grupo abstracto | # de elementos de orden 2 | Diagrama cíclico |
|---|---|---|---|---|
| 8 | C4h | Z4 × Z2 | 3 | |
| 12 | C6h | Z6 × Z2= Z3 × Z22= Z3 × Dih2 | 3 | |
| 16 | C8h | Z8 × Z2 | 3 | |
| 20 | C10h | Z10 × Z2= Z5 × Z22= Z5 × Dih2 | 3 |
etc.
Dnh de orden 4n es del tipo de grupo abstracto Dihn × Z2. Para n impar, esto ya está cubierto anteriormente, por lo que aquí se obtiene D2nh de orden 8n, que es del tipo de grupo abstracto Dih2n × Z2 (n≥1).
Así se obtienen, con los 3 grupos de puntos cristalográficos diédricos en negrita:
| Orden | Grupos de isometría | Grupo abstracto | # de elementos de orden 2 | Diagrama cíclico |
|---|---|---|---|---|
| 8 | D2h | Z23 | 7 | |
| 16 | D4h | Dih4 × Z2 | 11 | |
| 24 | D6h | Dih6 × Z2= Dih3 × Z22 | 15 | |
| 32 | D8h | Dih8 × Z2 | 19 |
etc.
Los siete restantes son, con los 5 grupos de puntos cristalográficos negrita (véase también arriba):
| Orden | Grupos de isometría | Grupo abstracto | # de elementos de orden 2 | Diagrama cíclico |
|---|---|---|---|---|
| 12 | T | A4 | 3 | |
| 24 | Td, O | S4 | 9 | |
| 24 | Th | A4 × Z2 | 7 | |
| 48 | Oh | S4 × Z2 | 19 | |
| 60 | I | A5 | 15 | |
| 120 | Ih | A5 × Z2 | 31 |
Dominio fundamental

|

|
| Los planos de reflexión para la simetría icosaédrica intersecan la esfera formando círculos máximos, con dominios fundamentales en forma de triángulo esférico rectángulo. | |
El dominio fundamental de un grupo de puntos es un cono. Un objeto con una simetría dada en una orientación dada se caracteriza por su dominio fundamental. Si el objeto es una superficie, se caracteriza por una superficie en el dominio fundamental que continúa hasta sus caras perimetrales radiales o en una superficie. Si las copias de la superficie no encajan, se pueden agregar caras o superficies radiales. Se ajustan de todos modos si el dominio fundamental está delimitado por planos de reflexión.
Para un poliedro, esta superficie en el dominio fundamental puede ser parte de un plano arbitrario. Por ejemplo, en un hexaquisicosaedro el dominio fundamental de la simetría icosaédrica es una cara completa. Ajustar la orientación del plano brinda varias posibilidades de combinar dos o más caras adyacentes en una, dando varios otros poliedros con la misma simetría. El poliedro es convexo si la superficie se ajusta a sus copias y la línea radial perpendicular al plano está en el dominio fundamental.
También la superficie en el dominio fundamental puede estar compuesta por múltiples caras.
Grupos poliédricos binarios
La aplicación Spin(3) → SO(3) es el doble recubrimiento del grupo de rotación por el grupo espinorial en 3 dimensiones. Este es el único recubrimiento conexo de SO(3), ya que Spin(3) es simplemente conexo.
Por el teorema de la retícula, hay una conexión de Galois entre subgrupos de Spin(3) y subgrupos de SO(3) (grupos de puntos rotacionales): la imagen de un subgrupo de Spin(3) es un grupo de puntos rotacionales, y la preimagen de un grupo puntual es un subgrupo de Spin(3). Debe tenerse en cuenta que Spin(3) tiene descripciones alternativas como el grupo unitario especial SU(2) y como el grupo de los cuaterniones unitarios. Topológicamente, este grupo de Lie es la esfera tridimensional S3).
La preimagen de un grupo de puntos finito se denomina grupo poliédrico binario, representado como ⟨l,n,m⟩, y recibe el mismo nombre que su grupo de puntos, con el prefijo binario, con el doble del orden del relacionado para el grupo poliédrico (l,m,n). Por ejemplo, la preimagen de la simetría icosaédrica (2,3,5) es el grupo icosaédrico binario, ⟨2,3,5⟩.
Los grupos poliédricos binarios son:
- : grupo cíclico binario de un (n + 1)-gono, de orden 2n
- : grupo diédrico binario de un n-gono, ⟨2,2,n⟩, de orden 4n
- : grupo tetraédrico binario, ⟨2,3,3⟩, de orden 24
- : grupo octaédrico binario, ⟨2,3,4⟩, de orden 48
- : grupo icosaédrico binario, ⟨2,3,5⟩, de orden 120





Estos se clasifican según la clasificación ADE, y el cociente de C2 por la acción de un grupo poliédrico binario es una singularidad de Du Val.[6]
Para grupos de puntos que invierten la orientación, la situación es más complicada, ya que hay dos grupos de pines, por lo que hay dos posibles grupos binarios correspondientes a un grupo de puntos dado.
Téngase en cuenta que esto es una cobertura de grupos, no una cobertura de espacios: la esfera es conexa y, por lo tanto, no tiene espacio recubridor. Por lo tanto, no existe la noción de un poliedro binario que cubra un poliedro tridimensional. Los grupos poliédricos binarios son subgrupos discretos de un grupo de Spin, y bajo una representación del grupo de Spin actúan sobre un espacio vectorial, y pueden estabilizar un poliedro según esta representación – bajo la aplicación Spin(3) → SO(3) actúan sobre el mismo poliedro sobre el que actúa el grupo subyacente (no binario), mientras que bajo la representación de spin u otras representaciones pueden estabilizar otros poliedros.
Esto contrasta con los poliedros proyectivos: la esfera recubre el espacio proyectivo (y también el espacio lenticular) y, por lo tanto, una teselación del espacio proyectivo o de un espacio lenticular produce una noción distinta de poliedro.
Véase también
- Anexo:Grupos de simetría esférica
- Anexo:Tablas de caracteres para grupos de puntos 3D químicamente importantes
- Grupos de puntos en dos dimensiones
- Grupos de puntos en cuatro dimensiones
- Simetría
- Isometría afín
- Grupo acción
- Grupo puntual
- Sistema cristalino
- Grupo espacial
- Anexo:Grupos finitos de orden bajo
- Simetría molecular
Referencias
- ↑ a b Curie, Pierre (1894). «Sur la symétrie dans les phénomènes physiques, symétrie d'un champ électrique et d'un champ magnétique» [On symmetry in physical phenomena, symmetry of an electric field and a magnetic field]. Journal de Physique (en francés) 3 (1): 393-415. doi:10.1051/jphystap:018940030039300.
- ↑ Shubnikov, A.V. (1988). «On the Works of Pierre Curie on Symmetry». Crystal Symmetries: Shubnikov Centennial papers. Pergamon Press. pp. 357-364. ISBN 0-08-037014-4. doi:10.1016/B978-0-08-037014-9.50007-8.
- ↑ Vainshtein., B. K. (1994). Modern Crystallography, Vol. 1. Fundamentals of Crystals. Symmetry, and Methods of Structural Crystallography (2nd enlarged edición). Springer-Verlag Berlin. p. 93. ISBN 978-3-642-08153-8.
- ↑ Fisher, G.L.; Mellor, B. (2007), «Three-dimensional finite point groups and the symmetry of beaded beads», Journal of Mathematics and the Arts 1 (2): 85-96, S2CID 40755219, doi:10.1080/17513470701416264.
- ↑ Harold Scott MacDonald Coxeter, Regular polytopes', §12.6 The number of reflections, equation 12.61
- ↑ Burban, Igor. «Du Val Singularities».
Bibliografía
- Coxeter, H. S. M. (1974), «7 The Binary Polyhedral Groups», Regular Complex Polytopes, Cambridge University Press, pp. 73–82..
- Coxeter, H. S. M.; Moser, W. O. J. (1980). Generators and Relations for Discrete Groups, 4th edition. New York: Springer-Verlag. ISBN 0-387-09212-9. 6.5 Los grupos poliédricos binarios, p. 68
- Conway, John Horton; Huson, Daniel H. (2002), «The Orbifold Notation for Two-Dimensional Groups», Structural Chemistry (Springer Netherlands) 13 (3): 247-257, S2CID 33947139, doi:10.1023/A:1015851621002.
Enlaces externos
- Resumen gráfico de los 32 grupos de puntos cristalográficos – formar las primeras partes (además de omitir n=5) de las 7 series infinitas y 5 de los 7 grupos de puntos 3D separados
- Descripción general de las propiedades de los grupos de puntos
- Poliedros canónicos más simples de cada tipo de simetría (usa Java)
- Point Groups and Crystal Systems, por Yi-Shu Wei, pp. 4 –6
- The Geometry Center: 10.1 Fórmulas para simetrías en coordenadas cartesianas (tres dimensiones)
| Control de autoridades |
|
|---|
 Datos: Q7208207
Datos: Q7208207